L3: DTFT, z-transform, and FIR filters¶
The purpose of this lecture is as follows.
To review the fundamentals of the DTFT and its relation to discrete-time signal processing
To review the fundamentals of the Z-transform
To review frequency response analysis using the Z-transform
To introduce FIR filter structures by means of examples
Signal Processing is Stream Processing¶
Last lecture, we discussed the nature of real-time implementation for DSP. In a real-time DSP system, every sample period, a new signal sample is presented to the DSP algorithm. The DSP algorithm then must take this signal sample and compute an output sample before the next input sample arrives. We talked about three different software mechanisms to achieve this real-time constraint: (a) polling-driven processing, (b) interrupt-driven processing, and (c) DMA-driven processing.
DSP algorithms are algorithms designed to compute on an infinite stream of samples.
Due to the real-time nature of the DSP processing, these samples are spaced  apart in time.
A DSP algorithm describes the output as a function of the previous
apart in time.
A DSP algorithm describes the output as a function of the previous  input samples, and
the previous
input samples, and
the previous  computed outputs. Of course,
computed outputs. Of course,  .
.

As time progresses, the DSP algorithm computes a stream of output samples from a stream of input samples. The implementation must handle not only the computations (ie. computing a new output from the previous inputs and previous outputs), but it must also handle the storage of those samples.
For example, if  , then a DSP algorithm for the design shown in the figure
could be a C function similar to the following.
, then a DSP algorithm for the design shown in the figure
could be a C function similar to the following.
1void dsp(input x2, // input 2 samples ago
2 input x1, // input 1 sample ogo
3 input x0, // input @now
4 output y3, // output 3 samples ago
5 output y2, // output 2 samples ago
6 output y1, // output 1 sample ago
7 output *y0) // output @now
However, this is only part of the tasks of a streaming DSP implementation in C. When the next input sample arrives, the DSP implementation must relabel the inputs and outputs: the @now input x0 and output y0 becomes the input x1 and output y1 of one sample ago; the input x1 and output y1 of one sample ago becomes the input x2 and output y1 of two samples ago; and so forth. For each new input sample, we have to process a tick function that handles this streaming. For example:
1int x0, x1, x2;
2int y0, y1, y2, y3;
3
4void tick() {
5 // shift the input stream
6 x2 = x1;
7 x1 = x0;
8 x0 = adc_output();
9
10 dsp(x2, x1, x0, y3, y2, y1, &y0);
11
12 // shift the output stream (for next sample)
13 y3 = y2;
14 y2 = y1;
15 y1 = y0;
16
17 dac_input(y0);
18}
Hence, when you develop a DSP implementation, you have to think about both the algorithm (e.g., filter) design, as well as the stream processing. Your DSP implementation works with a very special data structure, a stream. Since C compilers don’t have a stream datatype, you have to program the stream behavior as part of the DSP algorithm implementation.
The Discrete Time Fourier Transform¶
The Dirac Impulse¶
We will recap some of the basic properties of the
spectra of discrete-time signals. Consider the basic Dirac pulse  at time
at time  . The spectrum of this pulse is given by the Fourier Transform:
. The spectrum of this pulse is given by the Fourier Transform:

The spectrum of an impulse contains every frequency under the sun. Furthermore,
the magnitude and the phase of  have a particular format.
have a particular format.
The amplitude of every phasor making up is
uniform, and they are all aligned with each other (at t=0). It is this alignment that causes such
a sharp impulse to appear in the time domain.
At any time besides t=0, the combination of frequencies in will cancel each other out,
so that the time-domain value of  .
.
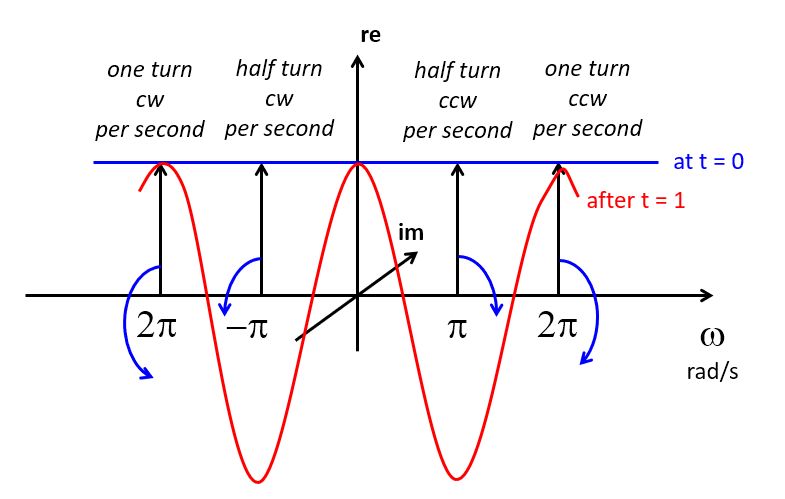
To see why, consider the behavior of the spectrum, as in the following picture.
Since  , each frequency contains a phasor of unit length. As time progresses, all of these phasors start to rotate at the speed corresponding to its frequency.
When
, each frequency contains a phasor of unit length. As time progresses, all of these phasors start to rotate at the speed corresponding to its frequency.
When  is positive, they rotate
counter-clockwise. When is negative, they rotate clockwise.
is positive, they rotate
counter-clockwise. When is negative, they rotate clockwise.
The reponse of the function in the time domain is the sum of all these phasors.
At time zero, all phasors (at every frequency) are aligned with the real axis, and
pointing upward. This makes  an infinitely high and infinitely narrow pulse with area 1.
If time advances one second, the phasors will rotate. After one second, the
phasor at
an infinitely high and infinitely narrow pulse with area 1.
If time advances one second, the phasors will rotate. After one second, the
phasor at  has made a half turn, while the phasor at
has made a half turn, while the phasor at  has made a
full turn. The time domain response at time = 1 will be zero, since as the sum of all phasors (over all ) cancels out to 0. This is true for every
has made a
full turn. The time domain response at time = 1 will be zero, since as the sum of all phasors (over all ) cancels out to 0. This is true for every  , since it is always possible to find
a frequency
, since it is always possible to find
a frequency  that has made a full turn at that moment, thereby cancelling out
the response of frequencies between DC and .
that has made a full turn at that moment, thereby cancelling out
the response of frequencies between DC and .
The time-shifted Dirac Impulse¶
Next, consider the spectrum of a Dirac pulse at a time different from zero, say  for a
Dirac pulse at time
for a
Dirac pulse at time  . Clearly, this pulse must also contain the same frequency components as . The only difference is that has shifted over time , which will induce a delay for all of these frequency components. The spectrum is now given by:
. Clearly, this pulse must also contain the same frequency components as . The only difference is that has shifted over time , which will induce a delay for all of these frequency components. The spectrum is now given by:

The term  still has unit magnitude for all frequencies, but there is a phase shift
of
still has unit magnitude for all frequencies, but there is a phase shift
of  radians for the phasor at frequency .
radians for the phasor at frequency .
The makes the term pretty important. This term describes the spectrum of a pulse delayed by time T. When we think of a sampled-data signal as a sequence of weighted pulses, we can thus construct the spectrum of the sampled-data signal by summing up the contribution of each pulse individually. Since the complete sampled data signal is a linear combination of weighted time-delayed pulses, the spectrum of a sampled data signal is a linear combination of the spectrum of these individual pulses.
Indeed, let’s say that you have a sampled-data signal  .
Then the signal can be written in the time domain
as
.
Then the signal can be written in the time domain
as  as follows:
as follows:

Now, making use of the linear property in frequency analysis, we can express the spectrum of as
the sum of the spectra caused by each single sample pulse. Mathematically:

This is quite cool: you can describe the frequency spectrum of a sampled-data signal simply by looking at the sampled-data values! This transformation also demonstrates that the spectrum of a sampled-data signal is periodic,
since  is periodic. In particular, the period is
is periodic. In particular, the period is  . Indeed, recall from Lecture 1 that the spectrum of a sampled data signal contains infinitely many copies
of the spectrum of the baseband signal. When the baseband signal has no components below frequency
. Indeed, recall from Lecture 1 that the spectrum of a sampled data signal contains infinitely many copies
of the spectrum of the baseband signal. When the baseband signal has no components below frequency  , then the baseband signal can be perfectly recreated from the sampled-data signal.
, then the baseband signal can be perfectly recreated from the sampled-data signal.
The Discrete Time Fourier Transform¶
The previous expression is very close in form to the Discrete Time Fourier Transform.
Important
The Discrete Fourier Transform is the spectrum of a sample-data signal given a
normalized sample period of  .
.
Here are some well-known DTFT pairs.
Sequence |
Discrete-Time Fourier Transform |
|---|---|
|
1 |
|
|
1 |
|
|
|
|
|







The last formula, for  , is somewhat particular, since for many sample sequences it’s
not easy to find a closed form. That brings us to the z-Transform.
, is somewhat particular, since for many sample sequences it’s
not easy to find a closed form. That brings us to the z-Transform.
The z-Transform¶
The z-transform is a generalization of the DTFT where we write a sampled-data sequence as a power series
in  , where
, where  has both real and imaginary components.
has both real and imaginary components.
The z-transform of a sampled-data signal becomes:

When equals the imaginary term  , then
, then  as in the DTFT.
However, in contrast to the DTFT, the z-transform is better at handling long series where summing
up
as in the DTFT.
However, in contrast to the DTFT, the z-transform is better at handling long series where summing
up  is complicated.
is complicated.
Here is an example. Suppose we have a unit step:

Which is tricky to sum up using  , since the sum does not converge for
, since the sum does not converge for  .
In the z-transform expression, we can rewrite
.
In the z-transform expression, we can rewrite  as a power series. Namely
as a power series. Namely

Hence, the z-transform of the unit step can be written as
The choice of is inspired by the Laplace transform variable s. But unlike the Laplace transform,
the has built-in periodicity  .
.
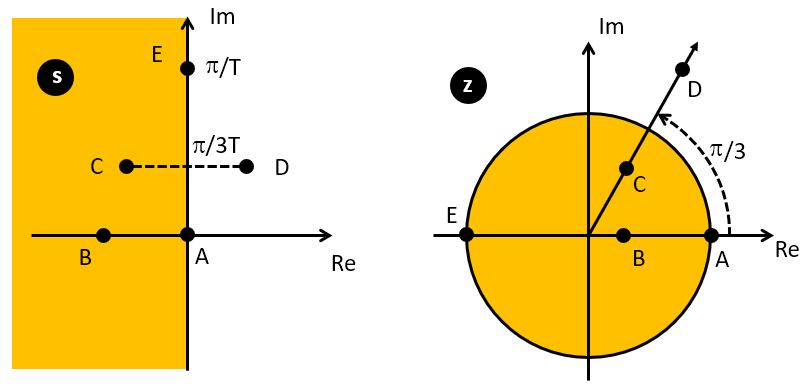
The Unit Circle¶
z-transform functions are commonly represented (and computed) on a unit circle presentation,
which reflects the periodic nature of . In fact, the z-plane (which contains the
unit circle) is the discrete-time equivalent of the s-plane for continuous-time functions.
The inside of the unit circle corresponds to the left side of the s-plane (stable side) while
the outside of the unit circle corresponds to the right side of the s-plane. The unit circle
itself maps to the frequency axis in the s-plane, and any feature in the z-plane at an angle  will repeat forever in the s-plane at
will repeat forever in the s-plane at  .
.
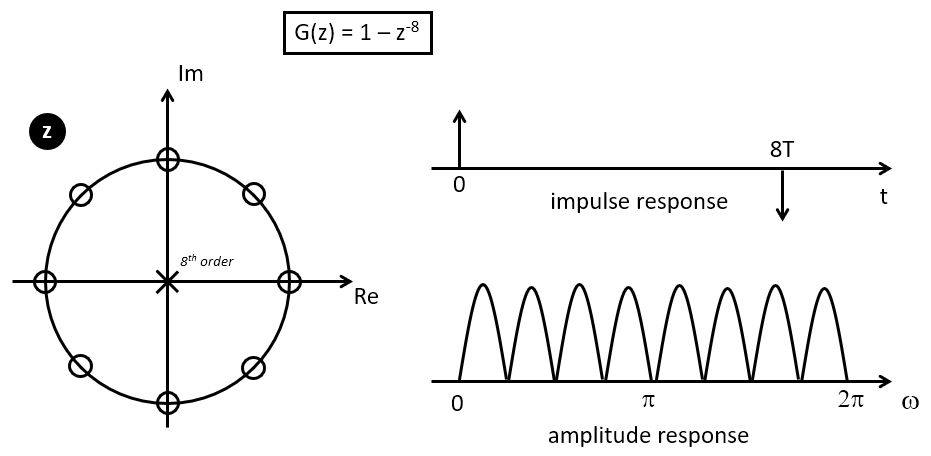
The unit circle is used to plot the poles and zeroes of the z-transform transfer function.
Consider for example the following z-transform function  , which has 8 zeroes and 8 poles.
, which has 8 zeroes and 8 poles.

As an 8th order demoninator and nominator polynomial, this function has 8 zeroes and 8 poles.
The zeroes and poles are marked on the unit circle on the following figure. The zeroes are
the 8th order root of unity (i.e. all solutions to  , which is
, which is  for
for  ).
).
The amplitude response is the magnitude response of G(z) while traveling along the unit circle.
When we go through a zero, the response is zero.
The time domain impulse response can
be read directly from the z-transform  .
The time domain impulse response of G(z) is simply two pulses
of opposite sign space eight sample periods apart.
.
The time domain impulse response of G(z) is simply two pulses
of opposite sign space eight sample periods apart.
The following C program verifies this ‘Comb Filter’.
1uint16_t processSample(uint16_t x) {
2 static float32_t taps[9];
3
4 // use this to create white noise
5 float32_t input = adc14_to_f32(0x1800 + rand() % 0x1000);
6
7 // use this to use a test signal
8 // float32_t input = adc14_to_f32(x);
9
10 uint32_t i;
11 for (i=0; i<8; i++)
12 taps[8-i] = taps[7-i];
13 taps[0] = input;
14
15 return f32_to_dac14(taps[0] - taps[8]);
16
17 return x;
18}
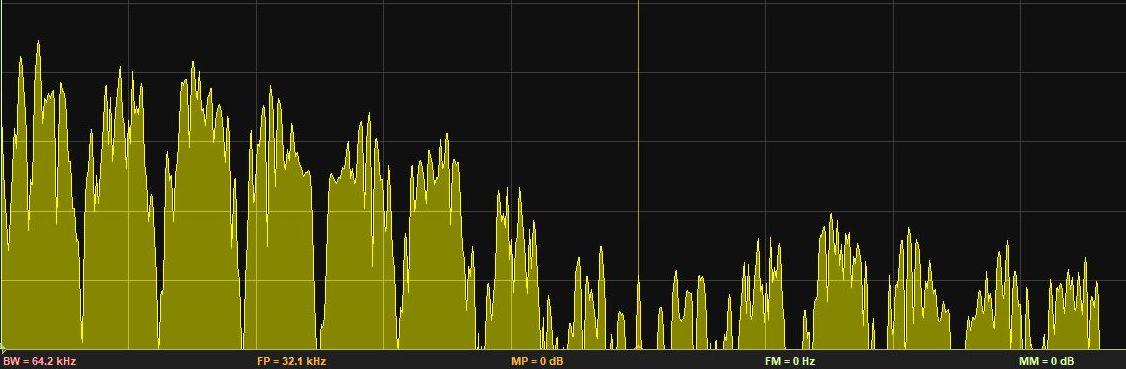
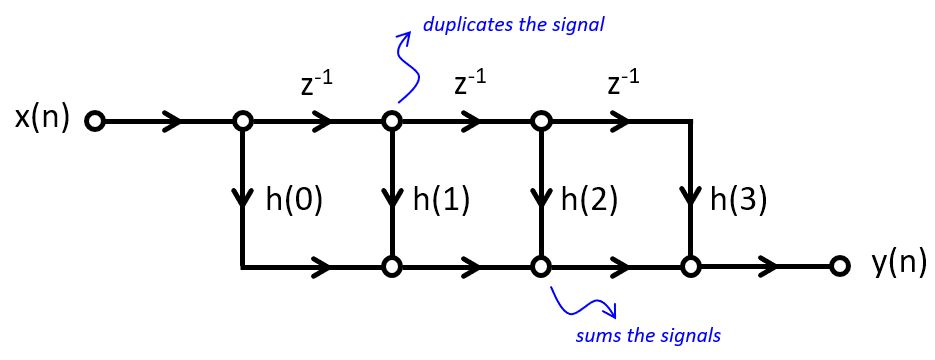
By injecting white noise into the filter, and taking the spectrum of the output, we can observe the 8 lobes of the frequency response. In the following graph, the central cursor line is at 32KHz, the sample frequency of the DSP system. The 8 lobes can be counted between DC and 32KHz, but the spectrum is distored by zero-order hold of the DAC.
FIR filters¶
The Comb filter we discussed while constructing the Unit Circle is an FIR design - a Finite Impulse Response filter. This filter computes its output using only the past input values to the system.
The Z-transform of an FIR is a polynomial in  .
.
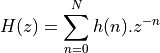
The sequence  is the impulse response of the FIR filter. This sequence is bounded.
is the impulse response of the FIR filter. This sequence is bounded.
The response of an FIR filter is computed by the discrete-time convolution of an input sequence with
the impulse response .
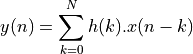
The classic direct-form implementation of an FIR filter is done by implementing a tapped delay line.
The following is an example of a third-order FIR filter. Such a filter would have three zeroes in the z-plane
and three poles at  .
It has 4 multiplications with coefficients, 3 additions, and three delays.
.
It has 4 multiplications with coefficients, 3 additions, and three delays.
FIR Design Example¶
Let’s look at another simple example of a FIR filter with the following impulse reponse:

Thus, the filter repeats on input pulse 8 times, starting with one sample delay. This has an averaging effect. To find the zeroes and poles of this filter, note that this FIR can be written as

And then you can use a root finding program to find the poles and zeroes of these
polynomials. In Matlab, for example, you can use root([0 1 1 1 1 1 1 1 1]) to find
the location of these zeroes. Interestingly the zero locations are the same
as for the impulse response  , except for the zero at
, except for the zero at  .
With some extra sleuthing, you may be able to show that this averaging Z transform
.
With some extra sleuthing, you may be able to show that this averaging Z transform
 can
be converted into the comb filter by adding a zero at .
can
be converted into the comb filter by adding a zero at .

We can then implement a program and measure the spectrum, to verify that this design, indeed, has an averaging effect. The following C program verifies this ‘Averager’.
1uint16_t processSample(uint16_t x) {
2 static float32_t taps[9];
3
4 // white noise
5 float32_t input = adc14_to_f32(0x1800 + rand() % 0x1000);
6
7 // test signal
8 // float32_t input = adc14_to_f32(x);
9
10 uint32_t i;
11 for (i=0; i<8; i++)
12 taps[8-i] = taps[7-i];
13 taps[0] = input;
14
15 // the filter. We're adding a scale factor to avoid overflow.
16 float32_t r = 0.125f * (taps[1] + taps[2] + taps[3] + taps[4] +
17 taps[5] + taps[6] + taps[7] + taps[8]);
18
19 return f32_to_dac14(r);
20
21 return x;
22}
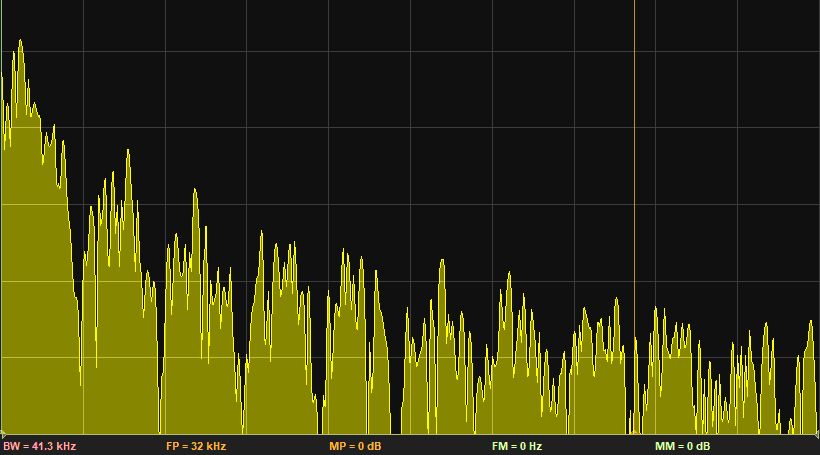
The measured spectrum response confirms 8 lobes, with a big one around DC.
Conclusions¶
We discussed (the meaning of) the spectrum of a Dirac impulse, and how this leads to the Discrete Time Fourier Transform (DTFT). We then generalized the DTFT to the z-transform and discussed common notation and presentation (polynomials, unit filter).
We applied that knowledge to the design of FIR filters, and we created two FIR filters: a comb filter, and an averaging filter. For both filters, we constructed the zero/pole plot, the impulse response, and we measured the frequency response using a C program.
We discussed the symmetrical property of linear-phase filters - which leads to constant (group-)delay filters, as well as to optimized implementation. In next lecture, we will dive deeper into the various FIR implementation techniques (direct, transpose, lattice, ..) and their realization using Matlab and C programming.
Optional: Discuss Matlab filter design tools